

宇宙開発シミュレーション「Kerbal Space Program」は、遊びながら本物の軌道力学が学べるという、唯一無二のゲームだ。だが初めてVAB(機体組立棟)を開いたとき、無数のパーツを前に途方に暮れる人も多い。この攻略記事では、ロケットの基本設計から初めてのカービン軌道到達までを、初心者が詰まりやすいポイントを中心に丁寧に解説する。
「ロケットを作って打ち上げて、軌道に乗せて……それだけなのに気づいたら数十時間溶けてた」 ——Steamユーザーレビューより
- ロケット設計の基本物理を理解する
- VABでステージングを正しく設定する
- グラビティターンで軌道投入し帰還する
▶推力・質量・重力の三角関係
Kerbal Space Programを楽しむうえで、物理の公式を暗記する必要はまったくない。ただし「何がロケットを動かすのか」という直感的な理解は不可欠だ。
Kerbal Space Programの物理エンジンはリアルな航空力学・軌道力学に基づいている。まず覚えておくべき基本概念は以下の3つだ。
- 推力(Thrust):エンジンが燃料を燃焼させ、排気を後方に噴出することで生まれる前進力。単位はニュートン(N)またはキロニュートン(kN)
- 質量(Mass):機体に積んだすべてのパーツ・燃料の合計重量。重いほど加速しにくくなる
- 重力(Gravity):カービン(Kerbin)の地表では常に機体を引き下ろし続ける力
F = ma(力=質量×加速度)という関係から、同じ推力でも機体が重いほど加速が遅くなることがわかる。燃料を大量に積めばロケットは長く燃焼できるが、その分重くなる——これがロケット設計における根本的なジレンマだ。
▶ドラッグとフライトの安定性
大気中を飛ぶロケットには「ドラッグ(空気抵抗)」が常にかかる。ドラッグは進行方向と逆向きに働く力で、機体の形状・速度・高度によって変化する。
また、飛行の安定性には重心(CoG)と推力中心(CoT)の位置関係が重要になる。
- CoG(Center of Gravity):機体全体の「重さの釣り合い点」
- CoT(Center of Thrust):すべてのエンジン推力が合わさった作用点
この2点がズレると、ロケットは空中でくるくる回転して制御不能になる。VAB(機体組立棟)ではこれらのインジケーターを常に確認しながら設計しよう。
「最初に作ったロケットは10回宙返りして30秒で墜落した。でも失敗から学んで、気づいたら月に着陸してた」 ——Steamユーザーレビューより
▶パーツ選びの基本構成
初心者が初めて軌道を目指すロケットに必要なパーツは、大まかに以下の通りだ。
| カテゴリ | 役割 | 初心者向けの選択例 |
|---|---|---|
| コマンドポッド | カーバルが乗る操縦席 | Mk1コマンドポッド |
| 燃料タンク | 液体燃料を蓄える | FL-T400 / FL-T800 |
| エンジン | 推力を生む | LV-T45 / LV-T30 |
| ステージ分離装置 | 使い終えたステージを切り離す | TR-18A スタックデカップラー |
| パラシュート | 帰還時の減速 | Mk16パラシュート |
| SASモジュール | 機体姿勢の自動制御 | ※コマンドポッドに内蔵の場合あり |
| 電力源 | SAS等の動作に必要 | Z-100電池 / OX-STATソーラーパネル |
最初は「細くてシンプル」なロケットを目指すことが成功への近道だ。太くてごてごてしたロケットは見た目は派手でも、重心がブレて制御が難しくなりやすい。
▶ステージングの設定方法
Kerbal Space Programにおける「ステージング」とは、燃料を使い切ったエンジンや燃料タンクを切り離して機体を軽くする仕組みだ。現実のロケットと同様の概念である。
ステージの設定は画面右下のステージングパネルで行う。
- VABでパーツを配置したら、画面右下にステージが自動で追加される
- ステージの順番は下から上に向かって実行される(一番下=最初に起動)
- ドラッグ&ドロップでステージの順番を入れ替えられる
- デカップラー(分離装置)とエンジンが同じステージにあると同時に起動するため、順番の設定ミスに注意
初心者向けのシンプルな2段式ロケット構成例:
- ステージ0(最終段):コマンドポッド+小型エンジン+燃料タンク少量(軌道投入・帰還用)
- ステージ1:大型燃料タンク+主力エンジン(大気圏突破用)
- ステージ2(最初に起動):固体燃料ブースターで初速を稼ぐ構成も有効
▶カウントダウンから最初のグレイブターン
VABでロケットを完成させたら、**発射台(Launch Pad)**へ転送して打ち上げ準備を行う。
- SAS(姿勢制御システム)をONにする(Tキー)
- RCS(反応制御スラスター)は任意でON(Rキー)
- スロットルを全開にする(ZキーまたはデフォルトスロットルをVABで設定済みなら不要)
- 最初のステージを起動(スペースキー)して打ち上げ
- 高度約100mを超えたら垂直飛行のまま上昇を続ける
- 高度**約10,000m(10km)**付近でゆっくりと東(画面右方向)に機体を傾け始める
この「ゆっくりと東へ傾ける」動作を**グレイブターン(Gravity Turn)と呼ぶ。真上に向かって飛び続けても宇宙空間には到達できるが、軌道に乗るためには横方向の速度(軌道速度)**が必要になる。グレイブターンはその速度を効率よく稼ぐための基本操作だ。
ポイント: Caps Lockを押すと操縦入力が「ソフト」になり、細かい舵の調整がしやすくなる。グレイブターン中はこの設定が特に有効だ。
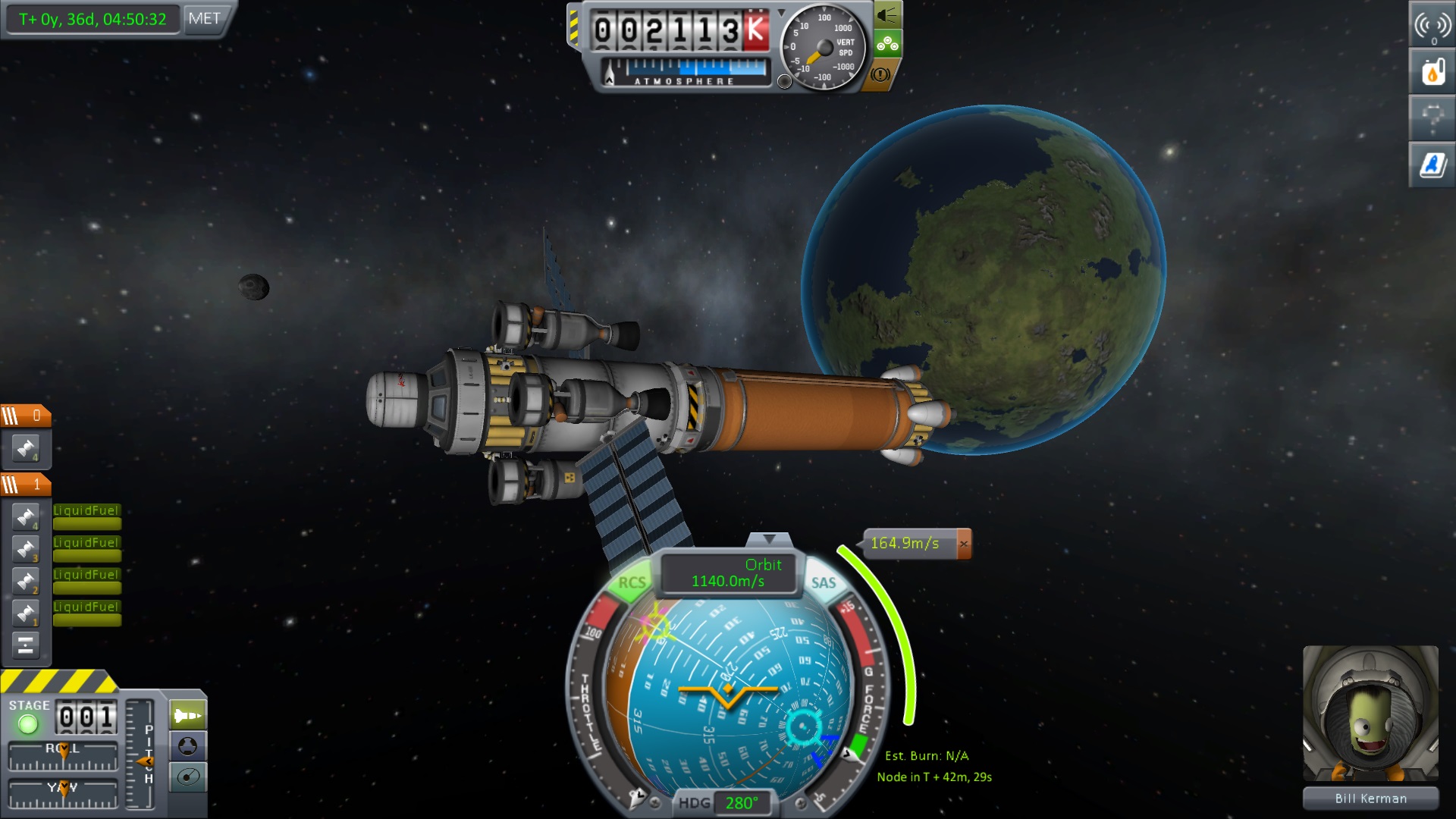
▶ナビボール(NavBall)の読み方
ナビボールは飛行中の「羅針盤」にあたる最重要UIだ。これを読めるかどうかが軌道到達の鍵を握る。
| マーカー名 | 色・形 | 意味 |
|---|---|---|
| プログレード | 黄緑・丸(●) | 現在の進行方向 |
| レトログレード | 黄緑・×(☓) | 進行方向と逆 |
| マニューバーノード | 濃紺・▼ | 計画したマニューバの方向 |
| 軌道法線 | 紫・↑ | 軌道面に対して垂直上方向 |
**「ナビボールは自分がその球の内側にいるイメージで読む」**のがコツだ。球の表面ではなく、自分がボールの中央にいて、球の内壁を見ているように捉えると方向感覚が掴みやすい。
ナビボールの下部には速度モード切り替えがある。
- Surface(地表基準):大気圏内飛行時に使用
- Orbit(軌道基準):軌道投入・宇宙空間での操作時に使用
大気圏を抜けたら必ずOrbitモードに切り替えること。
▶アポアプシスとペリアプシスの概念
マップビュー(Mキーで開く)では、現在の飛行軌跡を俯瞰で確認できる。軌道に関係する2つの重要な用語を覚えよう。
- アポアプシス(Ap):軌道の最高点(惑星から最も遠い点)
- ペリアプシス(Pe):軌道の最低点(惑星から最も近い点)
カービンの大気圏は高度約70kmまで存在する。ペリアプシスが70km未満だと、機体は大気の抵抗で減速・落下してしまうため、安定した軌道にはPeを70km以上に保つ必要がある。
▶初めての軌道到達手順(Apoapsis Burn法)
最も基本的な軌道投入の手順を以下に示す。
- 垂直上昇しながらグレイブターンを続け、アポアプシス(Ap)が目標高度(例:80〜100km)に達するまでエンジンを燃焼させる
- アポアプシスが目標高度に達したらエンジンをカットし、マップビューでApを確認
- 機体がApに近づくまでタイムワープ(標準はLキー)で時間を進める
- Apに到達する直前(残り約30〜60秒)でタイムワープを解除し、プログレード方向(ナビボールの●マーク)にノーズを向ける
- ペリアプシス(Pe)が70kmを超えるまでエンジンを燃焼させ続ける
- PeがApとほぼ同じ高度になれば、ほぼ円軌道の完成だ
注意: タイムワープ中はエンジンが起動できない。大気圏内・ステージ分離・パラシュート展開の直前は必ずリアルタイムに戻すこと。
▶大気圏再突入の基本
軌道から帰還するには、速度を落として落下軌道(ペリアプシスを大気圏内に下げる)を作る必要がある。
- マップビューでマニューバーノードを作成し、レトログレード方向にΔv(デルタv)を加える
- ペリアプシスが約30〜40kmになるようにバーンを計算する(低すぎると急減速で熱が発生しやすい)
- バーン後は帰還カプセルのみを残して不要なステージをすべて分離する
- 大気圏突入時はカプセルのヒートシールド面を進行方向(レトログレード側)に向けて姿勢を保つ
「月から帰ってきたら、ヒートシールドを積み忘れていたことに気づいた。ジェブは3000m/sで大気圏に突入し……」 ——Steamユーザーレビューより(笑えない実話)
ヒートシールドは帰還時に必須。後から忘れたことに気づかないよう、設計段階でチェックリストに入れておこう。
▶パラシュートの展開タイミング
Mk16パラシュートには「予備展開(Semi-Deploy)」と「完全展開(Full Deploy)」の2段階がある。
- 予備展開:高度約1,000m以下で自動展開(高速時でも機体が破損しにくい)
- 完全展開:速度が十分低下したタイミングで自動的に全開
パラシュートは大気圏内の適切な高度(目安:高度5,000m以下)で手動起動(スペースキー)または自動起動で展開する。高高度・高速時に展開すると破損するため、高度計を**Groundモード(緑表示)**に切り替えて実際の地面からの高さを確認しながら操作しよう。
▶よくある失敗パターンと対処法
Kerbal Space Programは「失敗して学ぶゲーム」だ。以下の失敗は初心者なら誰でも一度は経験する。
| よくある失敗 | 原因 | 対処法 |
|---|---|---|
| 発射直後にロケットが回転する | 重心とエンジン推力軸のズレ | CoGとCoTを一致させる設計に直す |
| 高度数kmで失速・墜落 | 推力不足または機体が重すぎる | エンジンを増やすか機体を軽くする |
| 大気圏を抜けたのに軌道に乗れない | 横方向の速度(軌道速度)が不足 | グレイブターンのタイミングを早める |
| 帰還時に燃え尽きる | ヒートシールドの未装備または向きが逆 | ヒートシールドをレトログレード側に |
| 燃料切れで軌道上に取り残される | 燃料搭載量の計算ミス | マップビューでΔvを事前確認する |
▶SASとCaps Lockの使いこなし
2つの「地味だけど超重要」な操作設定を最後に確認しておこう。
- SAS(Tキー)は常にONで飛行する。姿勢が安定し、意図しない回転を防いでくれる
- **Caps Lockは「精密操作モード」**のトグル。大気圏内の細かい舵調整や、マニューバーノードの微調整時に活用する
「Caps Lockは超重要。これをトグルすることで操縦入力がソフトになり、コントロールがより精密になる」 ——Steamコミュニティガイドより
Kerbal Space Programにおいてカービン軌道への到達は、ムン(Mun)着陸・惑星間飛行・宇宙ステーション建設など、あらゆる宇宙開発の基礎中の基礎だ。最初は必ずロケットが爆発したり、くるくる回ったり、カーバルが宇宙に取り残されたりするが、それもすべてこのゲームの魅力のうちだ。
失敗を重ねながら「なぜ落ちたのか」「なぜ軌道に乗れないのか」を考えていくうちに、気づけば本物の軌道力学の知識が身についている——それがKerbal Space Programの唯一無二の体験だ。
まずはシンプルな2段式ロケットで、カービン低軌道(LKO)への到達を目標に設定してみよう。そこに辿り着いたとき、次の目標が自然と見えてくるはずだ。