

Kerbal Space Program(以下KSP)の醍醐味はなんといっても、本格的な軌道力学をゲームの中で体感できることにある。ロケットを組み上げ、大気圏を突破し、初めて安定した軌道に乗ったときの感動は格別だ。しかしその一方で、「なぜ軌道に乗れないのか」「デルタVが足りないのはなぜか」という壁にぶつかるプレイヤーも多い。
この記事では、KSPで宇宙を旅するうえで最も重要な概念である軌道投入バーン(Orbit Injection Burn)とデルタV(ΔV)の計算・活用方法を、物理の基礎から実践的な操作手順まで徹底的に解説する。
「このゲームでは、気がついたら軌道力学を学んでいる。最初は30秒で墜落するロケットを作るが、気づけばムンに着陸している。」 — Steamレビューより
- デルタVの概念が宇宙開発の核
- 軌道投入バーンの手順を把握する
- グラビティターン最適化でデルタVを節約
▶1-1. 軌道とは何か
地球(KSPではKerbin)の周りを回る人工衛星は、なぜ落ちてこないのか。それは**「ずっと落ち続けているから」**だ。水平方向の速度が十分に大きければ、落下する速度と地平線が曲がるスピードが一致し、物体は永遠に落ち続けながら星の周りを回り続ける。
この「落ち続ける状態」を維持するための速度を**軌道速度(Orbital Velocity)**と呼ぶ。KSPのKerbinでは、高度約70kmの低軌道(LKO:Low Kerbin Orbit)を維持するためにおよそ 2,200 m/s の速度が必要だ。
▶1-2. 速度・加速度・推力の関係
軌道力学を理解するうえで、3つの基本量を押さえておく必要がある。
| 物理量 | SI単位 | KSPでの意味 |
|---|---|---|
| 速度(Velocity) | m/s | ロケットの現在の移動速度。ナビボールの数値で確認できる |
| 加速度(Acceleration) | m/s² | 単位時間あたりの速度変化量。エンジン推力と機体質量で決まる |
| 推力(Thrust) | N(ニュートン) | エンジンが生み出す力。F = ma の関係で加速度に変換される |
重要なのは F = ma(力 = 質量 × 加速度)の関係だ。同じエンジンを使っても、機体が重くなるほど加速度は落ちる。燃料を消費するほど機体が軽くなり、加速効率が上がるのはこのためだ。
▶1-3. プログレード・レトログレードを理解する
ナビボールに表示される方向マーカーは、軌道操作の基本となる。
- プログレード(Prograde):現在の進行方向。プログレード方向にバーンすると速度が上がり、軌道が広がる
- レトログレード(Retrograde):進行方向と逆。バーンすると速度が落ち、軌道が縮む
- ノーマル(Normal)/アンチノーマル(Anti-Normal):軌道面に対して垂直方向。軌道傾斜角の変更に使う
- ラジアルイン(Radial In)/アウト(Out):惑星方向・惑星逆方向。軌道の形を調整する際に使う
▶2-1. デルタVの定義
デルタV(ΔV) とは、ロケットが推進剤を使い切ったときに得られる速度変化量の合計を指す。単位は m/s。宇宙工学において「どれだけ遠くまで行けるか」を示す最も重要な指標だ。
デルタVが高ければ高いほど、より遠い天体へ到達できる。逆に言えば、目的地に必要なデルタVを確保できなければ、どんなに設計が優れたロケットでも途中で動けなくなる。
ジェブ(Jeb)と相棒がムンに置き去りにされる悲劇は、帰還用のデルタV不足が原因であることが多い。設計前に必要デルタVを計算する習慣をつけよう。
▶2-2. ツィオルコフスキーのロケット方程式
デルタVは以下のロケット方程式で計算できる。
ΔV = Isp × g₀ × ln(m₀ / m_f)
| 変数 | 意味 |
|---|---|
| Isp | 比推力(エンジンの燃料効率。単位は秒) |
| g₀ | 標準重力加速度(9.81 m/s²) |
| m₀ | バーン前の機体総質量(燃料込み) |
| m_f | バーン後の機体質量(燃料消費後) |
| ln | 自然対数 |
計算が複雑に見えるが、KSPにはVAB(ロケット組立棟)でデルタVを自動計算する機能が搭載されている。ステージごとのΔVが表示されるため、発射前に必ずチェックしよう。
▶2-3. デルタVマップを活用する
KSPコミュニティが作成したデルタVマップは、各天体間を移動するために必要なΔVを一覧化した必携ツールだ。KerbinのLKOを起点として、各目的地まで必要なΔVの目安が記載されている。
主要目的地への参考デルタV(LKOからの目安):
| 目的地 | 軌道投入後の速度目安 | 難易度 |
|---|---|---|
| ムン(Mün) | 約 3,060 m/s | ★★☆ 初心者向け |
| ミンマス(Minmus) | 約 3,200 m/s | ★★☆(軌道傾斜に注意) |
| ドゥナ(Duna) | 約 3,290 m/s | ★★★ |
| イヴ(Eve) | 約 3,250 m/s | ★★★ |
| ジュール(Jool) | 約 4,150 m/s | ★★★★ |
| イーロー(Eeloo) | 約 4,315 m/s | ★★★★★ |
※上記の数値はLKOからの惑星間遷移バーン後の速度目安。実際には重力損失・大気損失も考慮が必要。
▶3-1. LKO(低カービン軌道)への投入
初めての軌道投入は、多くのプレイヤーが何度も失敗する関門だ。以下の手順で確実に低軌道へ乗ろう。
- 発射直後は垂直に上昇する(大気圏下層では空気抵抗が大きいため)
- 高度約 10,000m 付近でグラビティターンを開始。機首を東(プログレード方向)に約10〜15度傾ける
- 高度が上がるにつれて徐々に傾け、45,000mあたりでは約45度の角度を維持
- アポアプシス(Ap:軌道の最高点)が70,000m以上になったらメインエンジンを停止
- マップビューでアポアプシスにマニューバノードを配置し、プログレード方向にバーンしてペリアプシス(Pe:最低点)も70,000m以上に引き上げる
ポイント: アポアプシスに到達する直前でバーンを実施すること。ペリアプシスが大気圏内(70km以下)に残っていると、周回ごとに大気抵抗で減速し、やがて落下する。
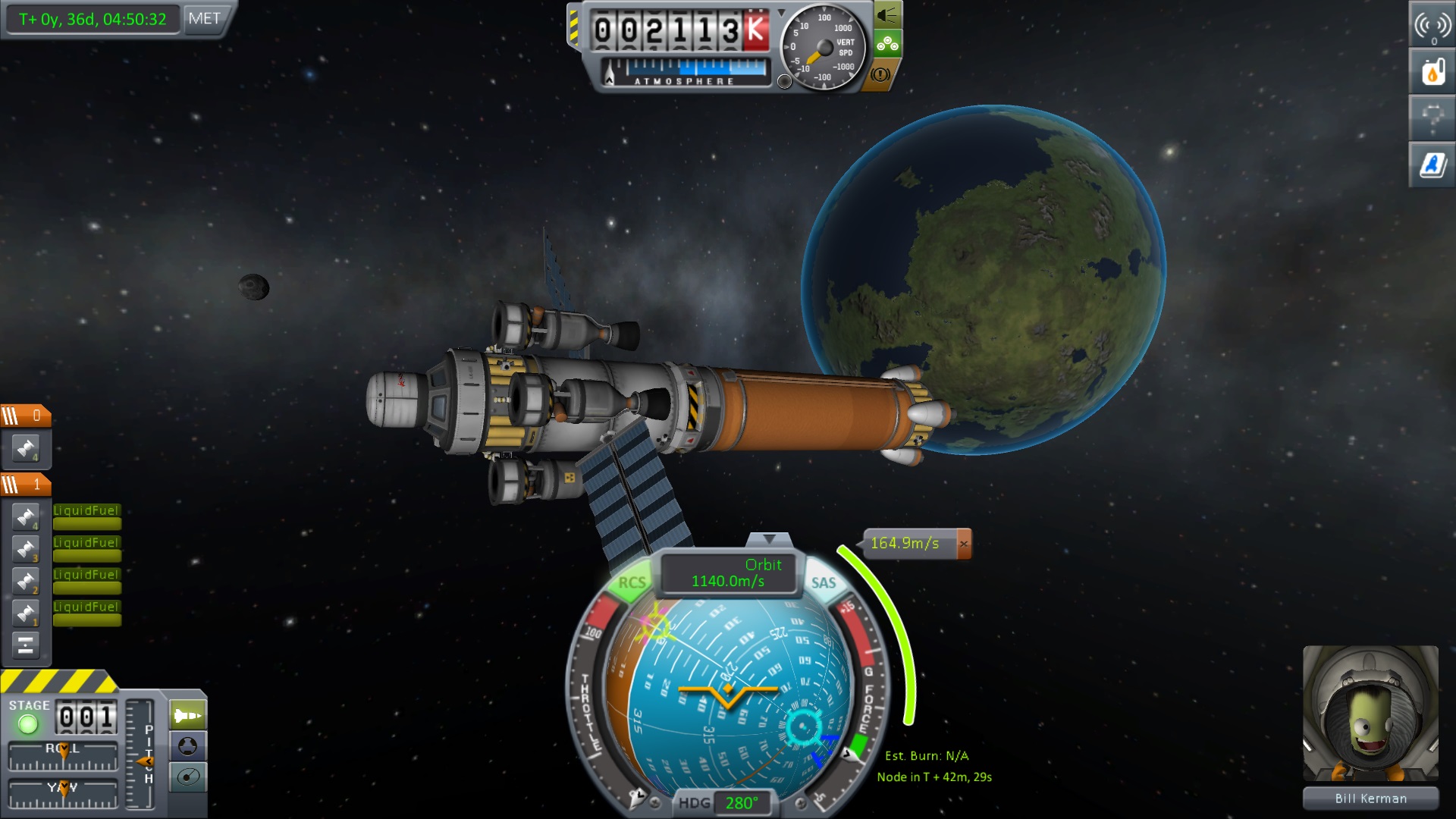
▶3-2. マニューバノードの使い方
KSPのマップビューではマニューバノードを使って、バーンのタイミングと方向を事前に計画できる。
- マップビューを開き、現在の軌道上の任意の点をクリック
- **「マニューバノードを追加」**を選択
- ノードのハンドルをドラッグしてバーン方向と量を調整
- プログレード(緑+):軌道を広げる
- レトログレード(緑-):軌道を縮める
- ノーマル(紫):軌道傾斜角を変更
- 予測軌道(点線)が目標軌道と一致するまで調整
- **「バーンまでの時間」と「必要ΔV」**を確認してバーンを実行
▶3-3. 惑星間遷移バーン(惑星間移動)
他の惑星へ向かう場合、**打ち上げタイミング(ローンチウィンドウ)**が非常に重要になる。惑星は常に動いているため、発射タイミングが悪いと目的地に辿り着けなかったり、大量の余分なΔVを消費したりする。
ムンへの投入バーン例(実践手順):
- マップビューを開き、ムンが画面上方向に来るよう視点を調整する
- 東向きに発射してLKO(80〜100km程度の円軌道)を確立する
- ムンが画面上方に位置しているとき、**軌道の右側(時計で言う3〜4時の位置)**にいるタイミングでマニューバノードを配置
- プログレード方向に速度が約 3,060 m/s になるまでバーンを計画
- 予測軌道がムンのSOI(球体影響圏)に入ることを確認してから実行
ドゥナなど外惑星への遷移バーン例:
| 惑星 | 発射タイミング(Kerbinとの角度差) | バーン位置 |
|---|---|---|
| ドゥナ | Dunaが +44度 先行 | 軌道の5時方向 |
| ジュール | Joolが +97度 先行 | 軌道の4時方向 |
| イーロー | Eeloが +101度 先行 | 軌道の4時方向 |
| イヴ | Eveが -54度(後方) | 軌道の11時方向 |
| モーホー | Mohoが -252度(後方) | 軌道の10時方向 |
▶4-1. グラビティターン(重力ターン)の最適化
グラビティターンは、大気圏突破時に重力を利用して効率よく速度方向を変える技術だ。急激に傾けると空気抵抗が増大し、ΔVを無駄遣いする。緩やかに、しかし確実にプログレード方向へ倒していくことが燃費向上の鍵となる。
- ターン開始は 高度10,000m前後が目安
- ロケットの形状・重量配分によってベストなターン角度は異なる
- マッハ数と空気抵抗を意識しながら徐々に傾ける
▶4-2. ホーマン遷移軌道
2点間を移動する最も燃料効率の良い軌道変更方法がホーマン遷移軌道だ。
- 現在の円軌道でプログレード方向にバーンし、楕円軌道を形成する
- 楕円軌道のアポアプシス(最遠点)に到達したとき、再度プログレード方向にバーンして円軌道化する
この2回のバーンで最小ΔVによる軌道高度変更が実現できる。逆に、軌道を下げる場合は2回ともレトログレード方向にバーンする。
▶4-3. 軌道傾斜角の変更はコストが高い
軌道傾斜角(軌道面の傾き)を変更するには、ノーマルまたはアンチノーマル方向へのバーンが必要だ。しかしこの操作は非常にΔVを消費する。
重要: 軌道傾斜角の変更は、できるだけ速度が遅い地点(アポアプシス付近)で行うと消費ΔVを最小化できる。ミンマスへ向かう際は軌道傾斜角の補正を忘れずに。
▶5-1. 「デルタVが足りない」問題
最も多い失敗のひとつ。ムンから帰還できなくなるのはこのパターンが多い。
対策:
- 発射前にVABで各ステージのΔVを確認する
- デルタVマップを常に参照し、往路だけでなく帰路のΔVも確保する
- ステージ分離を活用し、不要な機体質量を早めに切り離す
▶5-2. 「軌道が安定しない/大気圏に落ちてくる」問題
ペリアプシスが大気圏内(70km以下)に残っている場合、大気抵抗によって徐々に減速し、最終的に落下する。
対策:
- LKO確立時にペリアプシスが 70km以上 になるよう調整する
- マップビューで軌道のPe表示を必ず確認する
▶5-3. 「バーンタイミングを逃す」問題
マニューバノードはあくまで計画ツールだ。実際のバーンはノード到達の前半分の時間から開始する必要がある。例えばバーン時間が60秒なら、ノード到達の30秒前から点火する。
対策:
- バーン残り時間(Burn Time)をナビボールで確認する
- 長いバーンは複数周回に分けて少しずつ行う(精度は落ちるが燃料効率は維持できる)
Kerbal Space Programの軌道力学は、一見難解に見えるが、実際に打ち上げを繰り返すうちに自然と理解できるように設計されている。デルタVマップを手元に置き、マニューバノードで事前計画を立て、グラビティターンで燃料効率を高める。この3つの習慣を身につけるだけで、ムン着陸から惑星間航行まで大きく前進できる。
ジェブが何度墜落しようとも、それは学びのコストだ。次の飛行は必ず、より遠くへ届く。